
Over-Sand Vehicle
Hardware & Programming | Team | 2017
The over-sand vehicle was a team project I did for my introduction to engineering course at UMD. I led the programming team, and did a lot of CAD for concept renderings, simulation, and 3d-printing.

For the programming, I designed the architecture of the OSV's code, and implemented the majority of the code. All of the logic was written in C for Arduino, and interfaced with the classes computer vision library to complete tasks like navigation through variable terrain, path readjustment, and accurate measurement of a block with varying dimensions and color, utilizing the three-sensor array we designed (consisting of a color sensor and two servo-mounted IR sensors). The codebase was designed with modularity and functionality at the forefront, with constant test-based tweaking to improve real-world performance and accuracy, and avoid redundancy. Unfortunately, I can't share code here as it is against course policy.
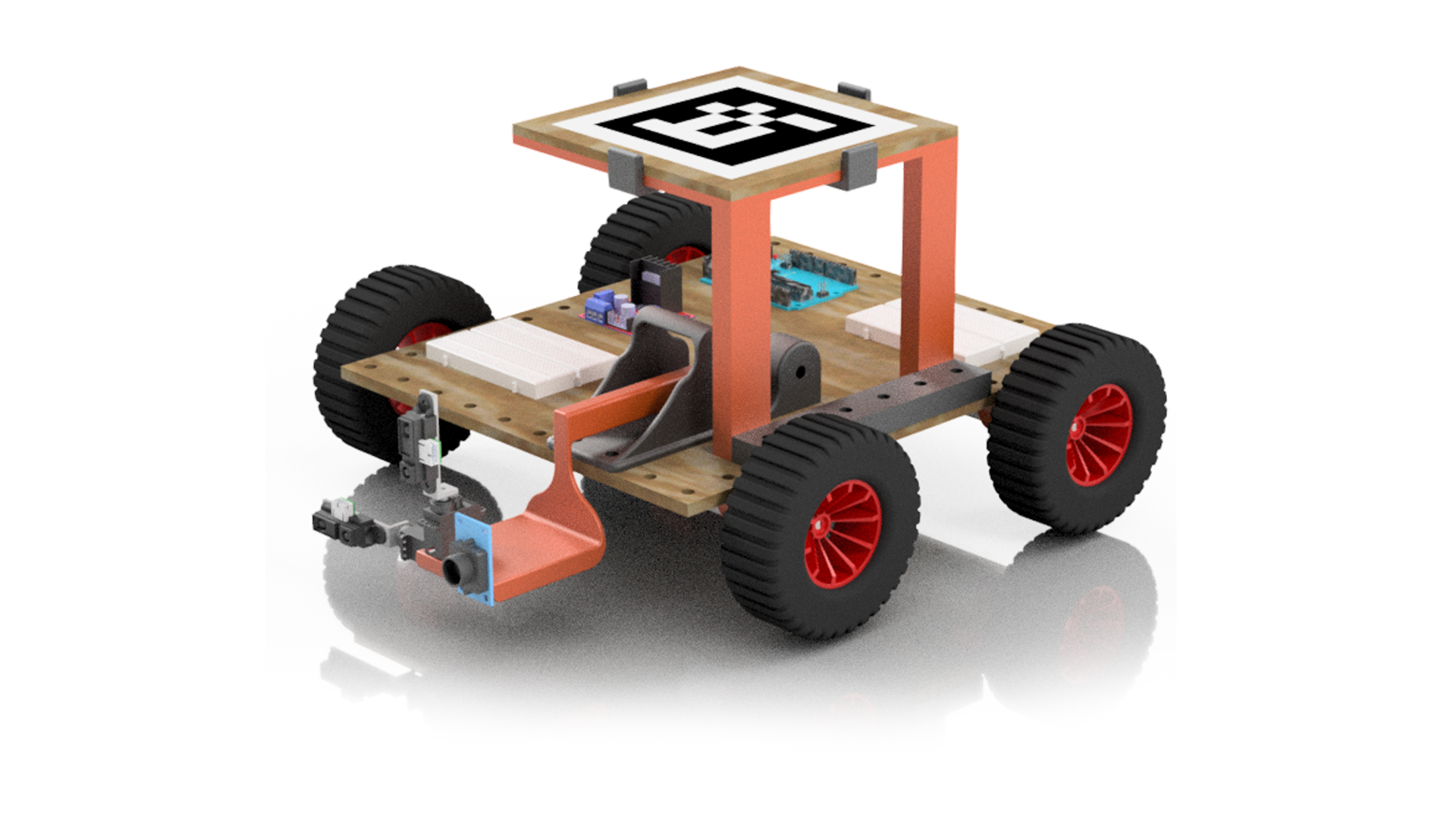
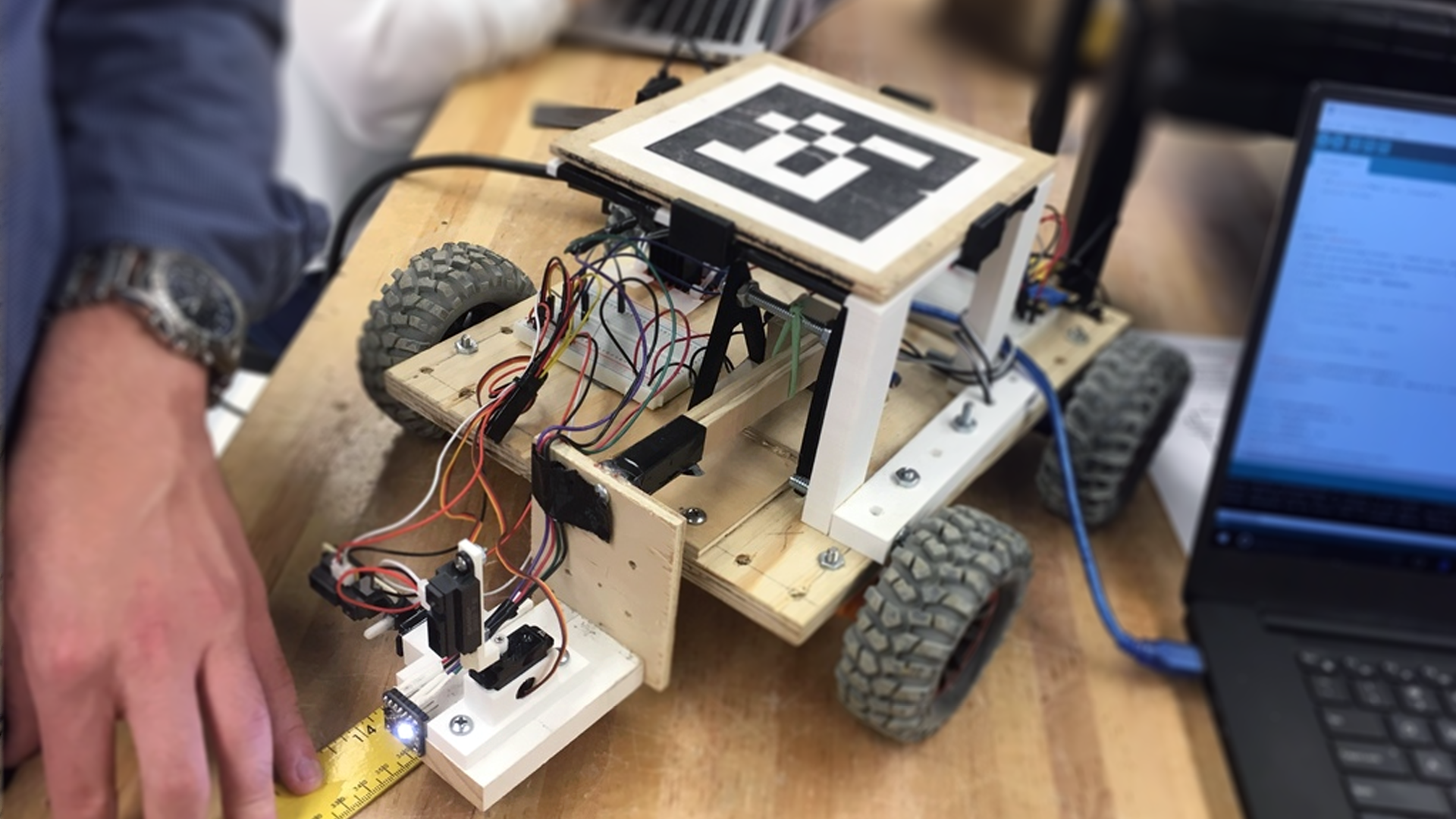
In addition to my primary capacity as lead programmer, I also designed all of the presentation and concept renderings, and drew up some of the more complicated 3d-printed components on our OSV- as well as worked on the hardware and electrical side to fabricate and assemble the actual OSV.